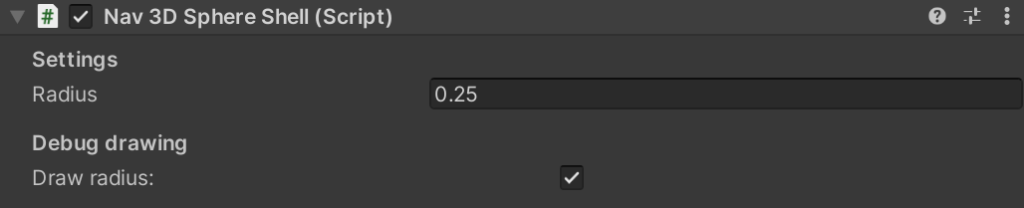
Represents a spherical shell that is perceived by other agents as an object to a...
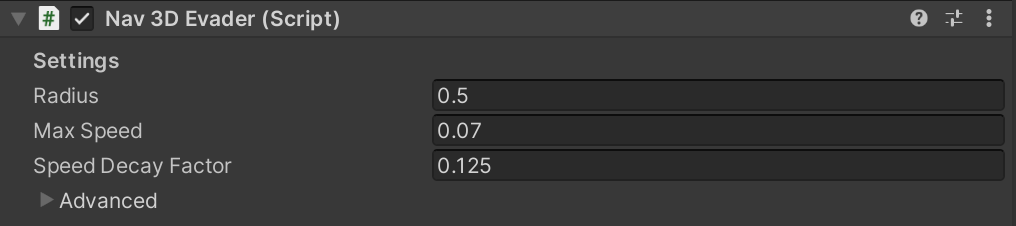
There is also a separate controller, whose behavior consists of just avoiding ne...
This class implements several methods to get a list of all Nav3DAgents located i...
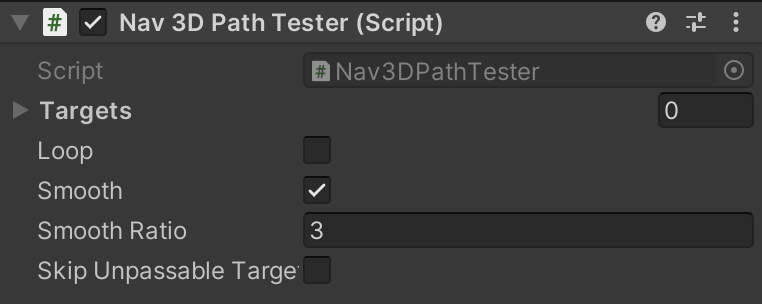
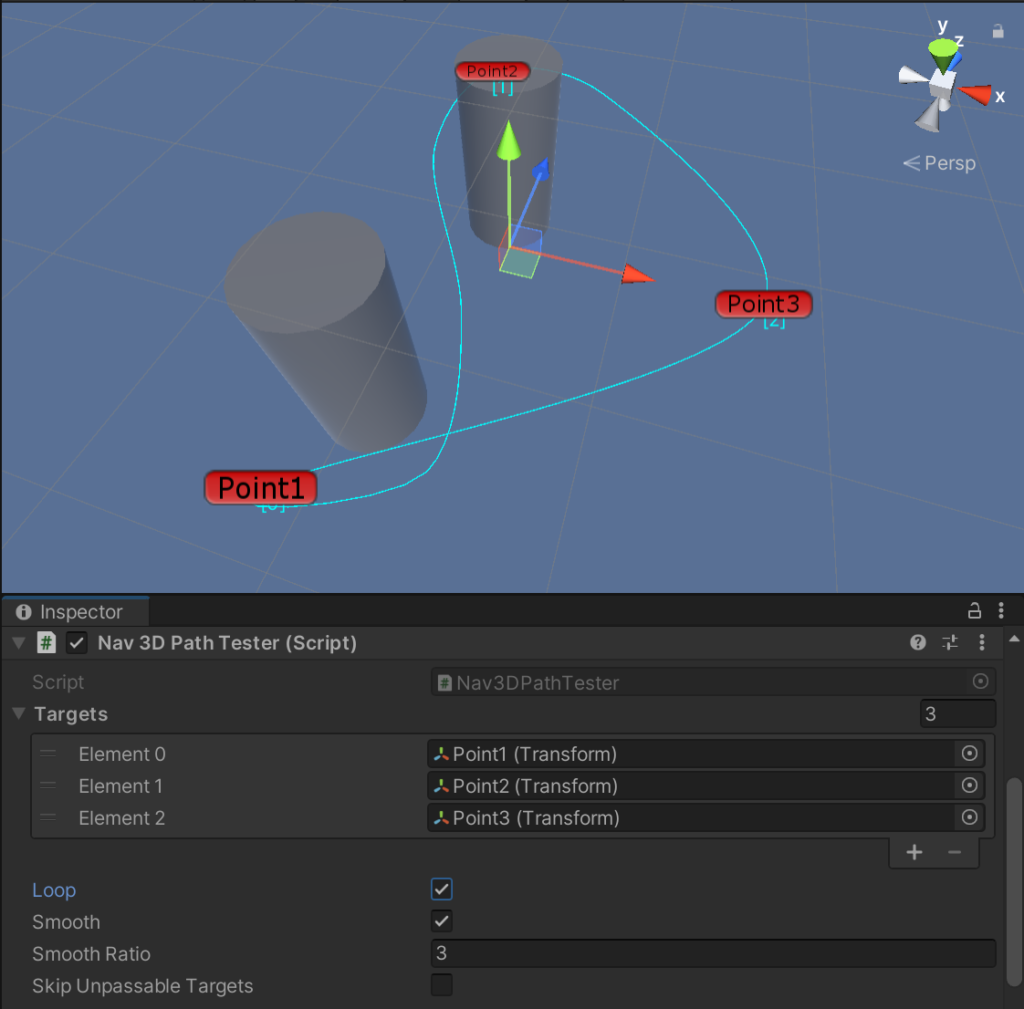
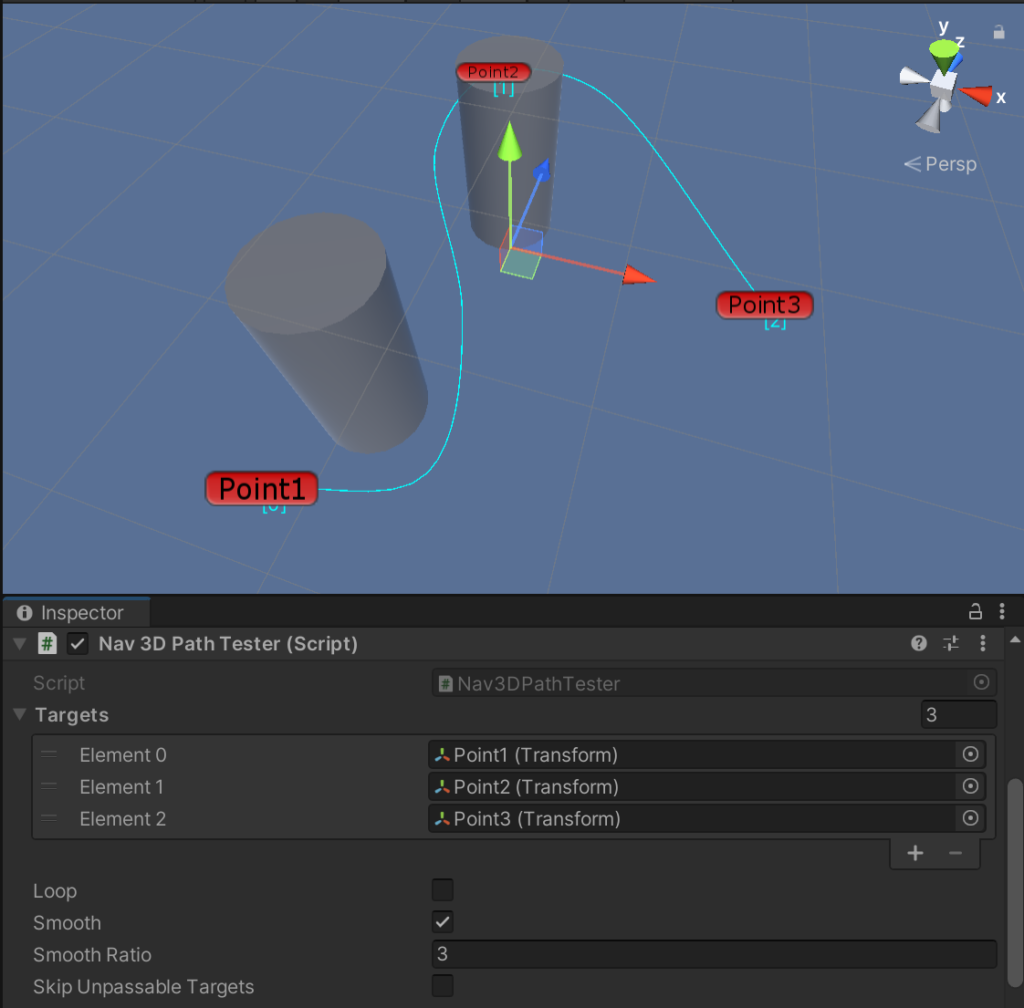
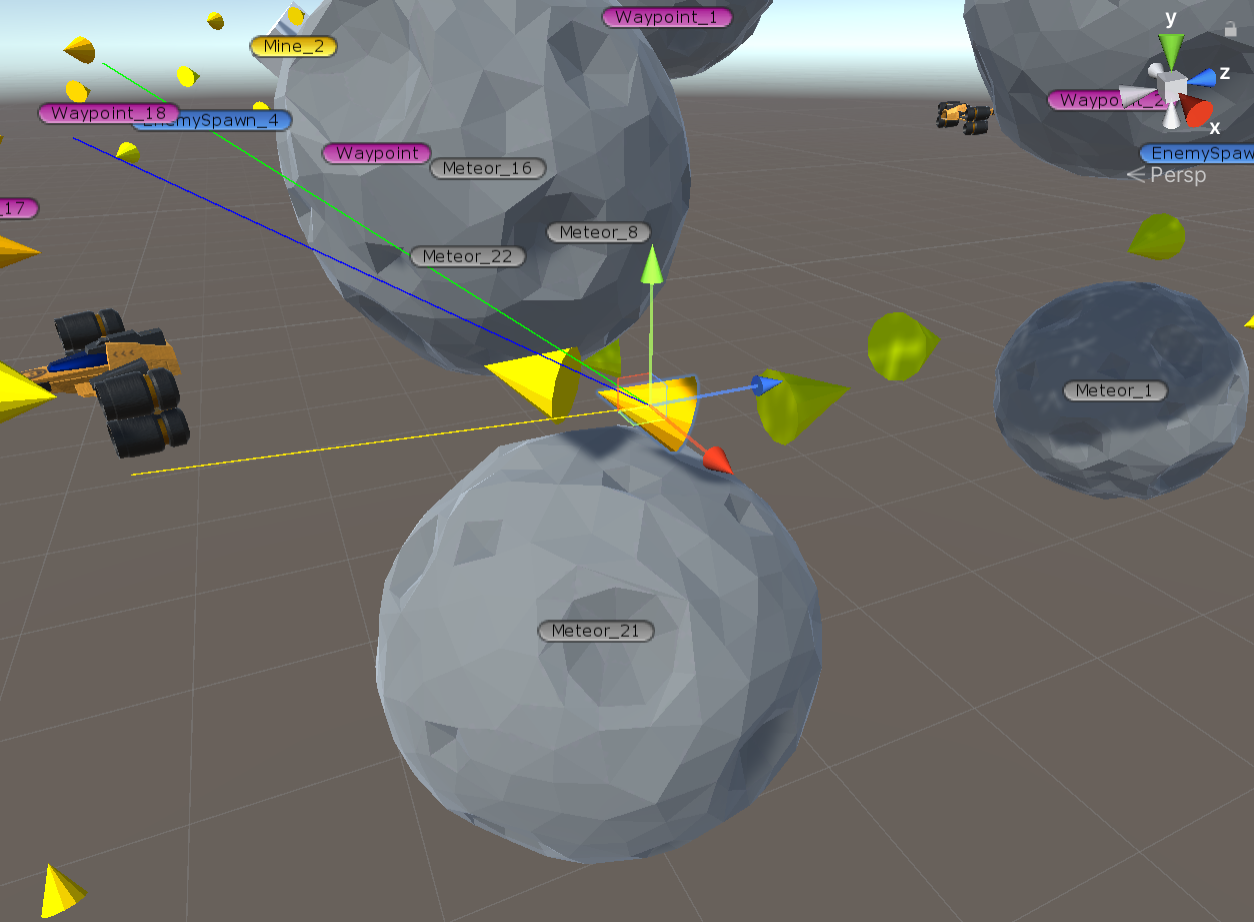
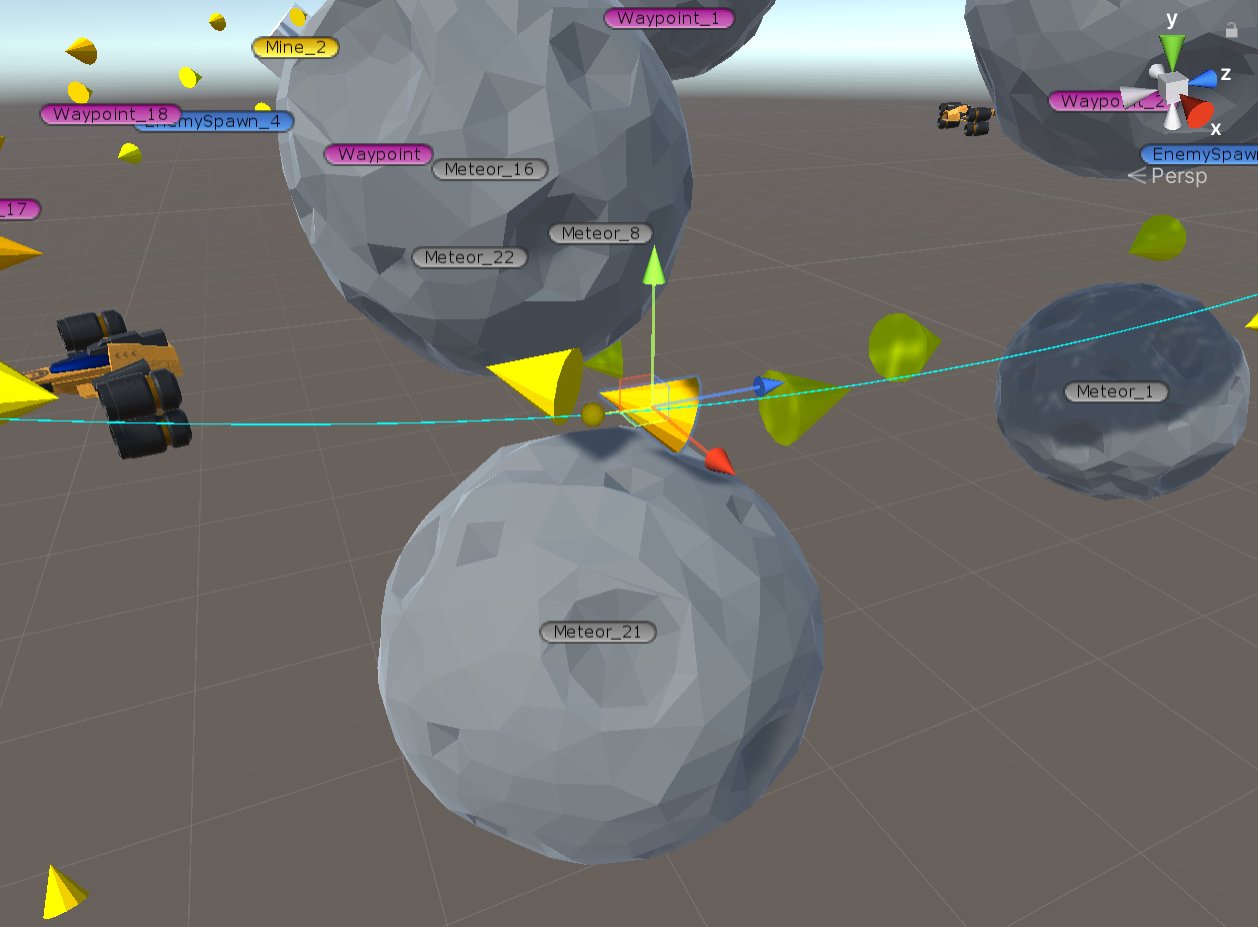
We implemented a useful component (Nav3DPathTester), which can be used while bui...
Contains the pathfinding data and time statistics. Time statistics: public TimeS...
For the convenience of notification when the pathfinding finished, the following...
Here you can copy the contents of the agent log to the clipboard by clicking the...
In this section, you can visualize the agent and his nearest environment. This s...
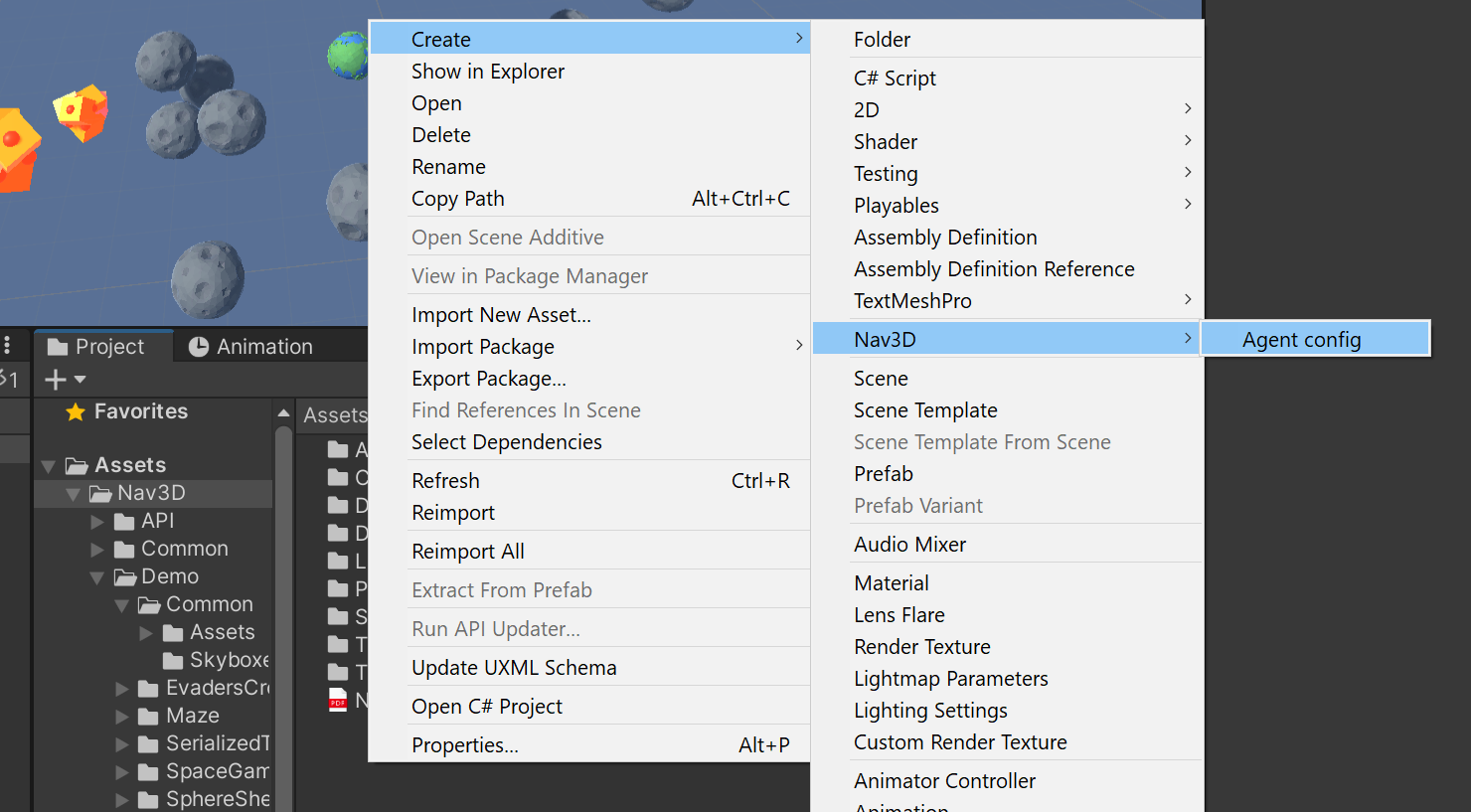
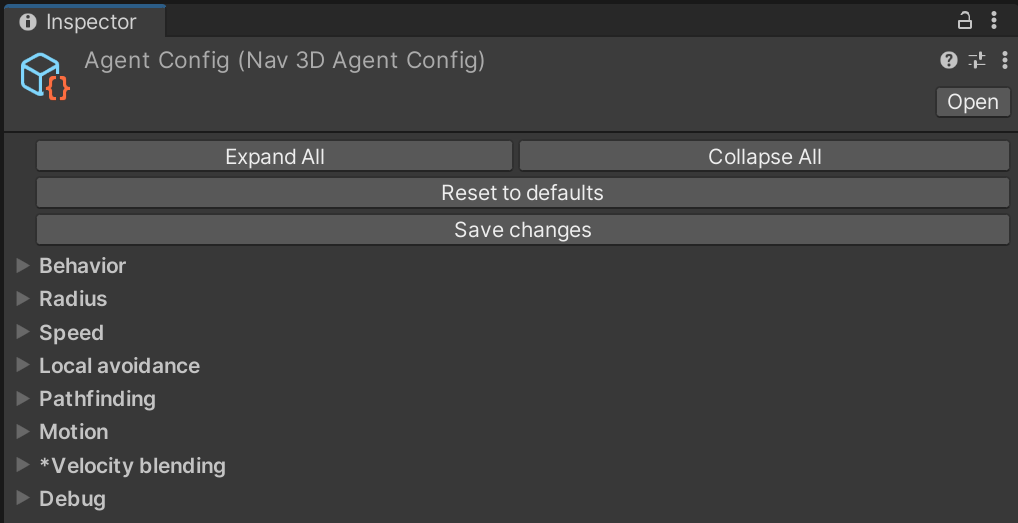
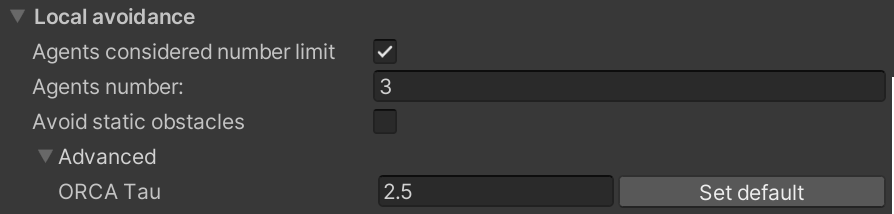
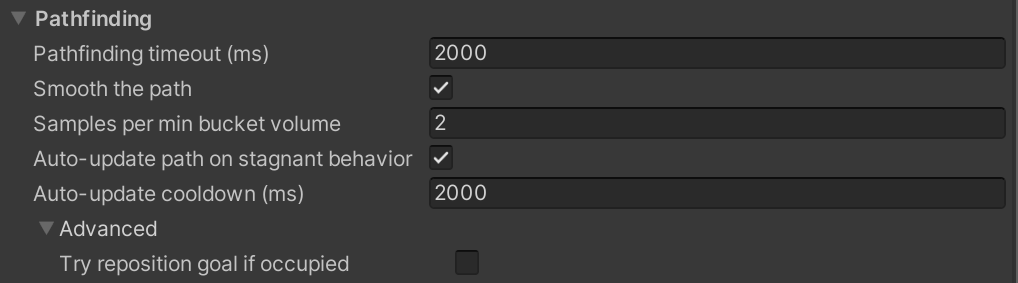
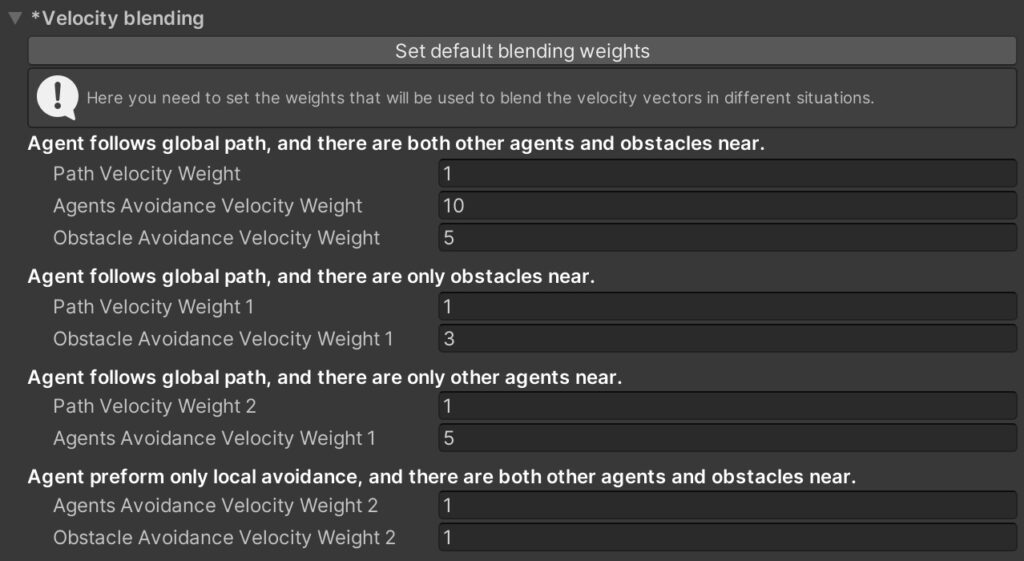
All Nav3DAgentConfig parameters can be configured through the code as well. To ...
Nav3DManager is a helper static class. Can be useful for checking whether Nav3D ...
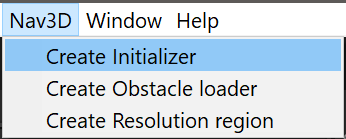
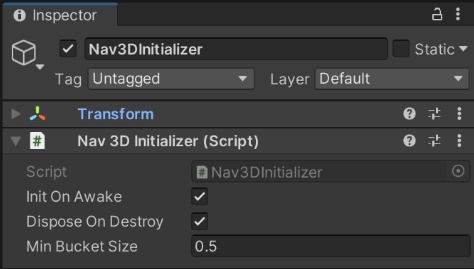
To use Nav3D in playmode, you need to initialize it. The Nav3DInitializer compon...
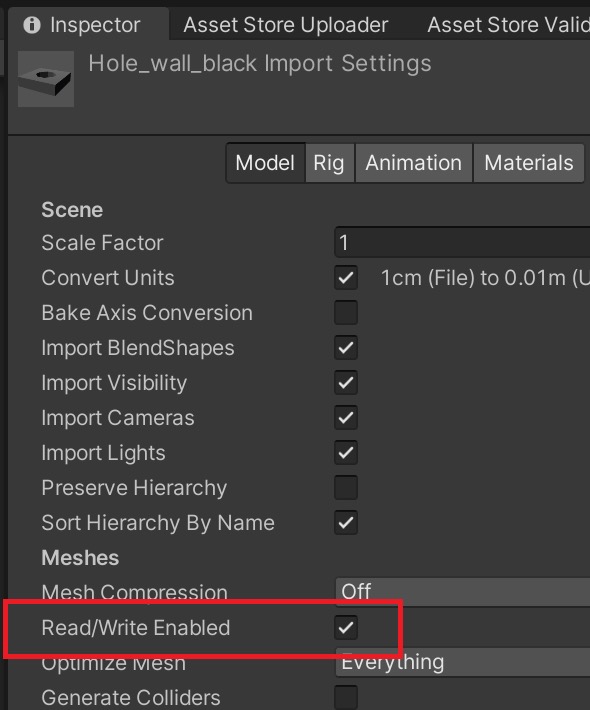
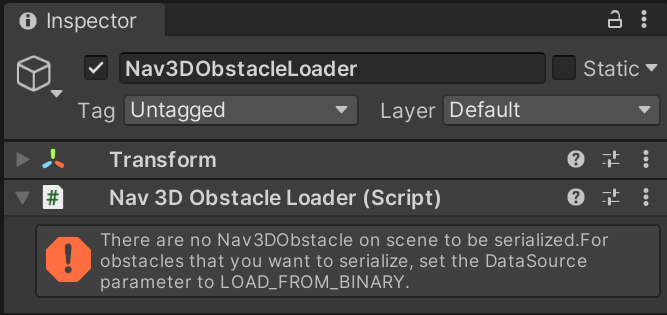
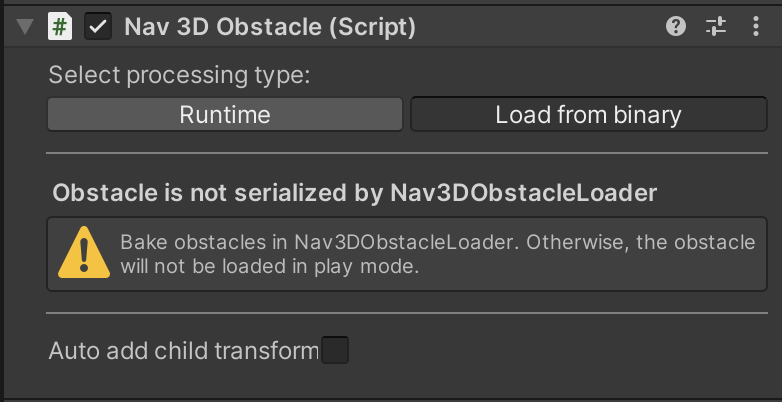
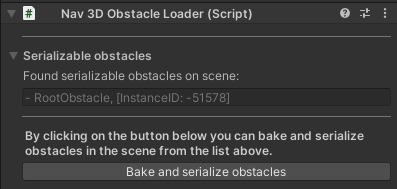
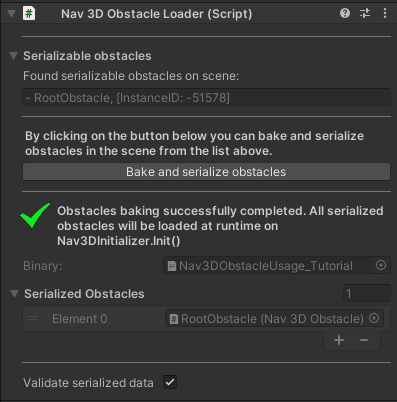
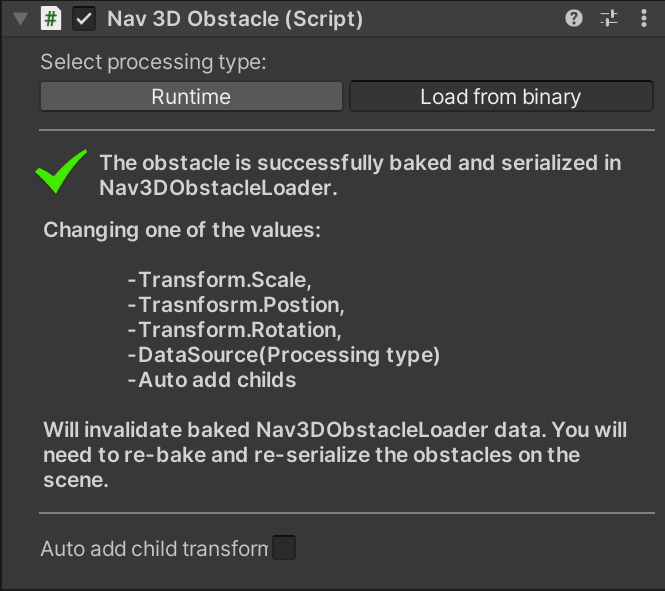
To use the possibility of pre-baking obstacles on the scene in editor mode and t...