





Лог агента
Here you can copy the contents of the agent log to the clipboard by clicking the...
Debug drawing
In this section, you can visualize the agent and his nearest environment. This s...
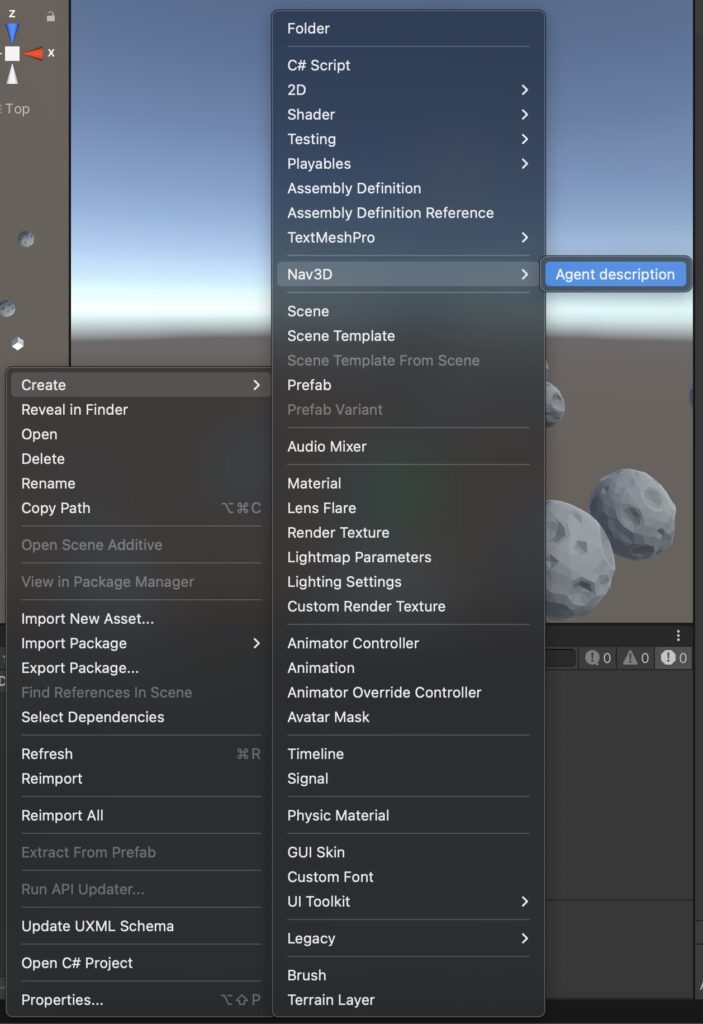
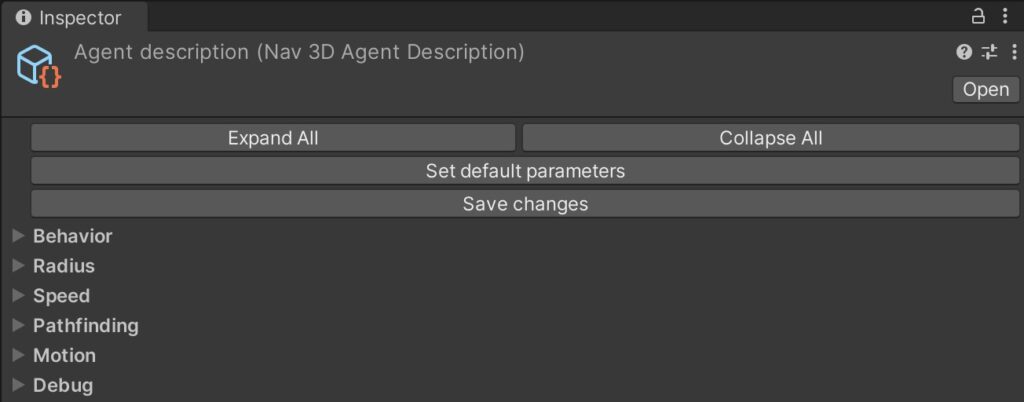
Создание и настройка описания агента из кода
All Nav3DAgentDescription parameters configured in the description inspector c...
Nav3DManager
Nav3DManager is a helper static class. Can be useful for checking whether Nav3D ...
Nav3DInitializer
To use Nav3D in playmode, you need to initialize it. The Nav3DInitializer compon...
Nav3DObstacleLoader
To use the possibility of pre-baking obstacles on the scene in editor mode and t...
Nav3DObstacle
To manage obstacles on the scene, the Nav3DObstacle component is designed. Attac...
Сочетания препятствий
We will call obstacles with the selected processing mode “Runtime” as runtim...
Операции с препятствиями
Regardless of the obstacle processing mode, the processing procedure consists of...
Немного глубже о препятствиях
As already described above, in order for an obstacle to be taken into account du...
Nav3DAgent : Debug
The Nav3DAgent has an inspector that provides several useful functions to help w...
Nav3DAgent
As mentioned above, you can use the Nav3DAgent script as a component for your ga...

